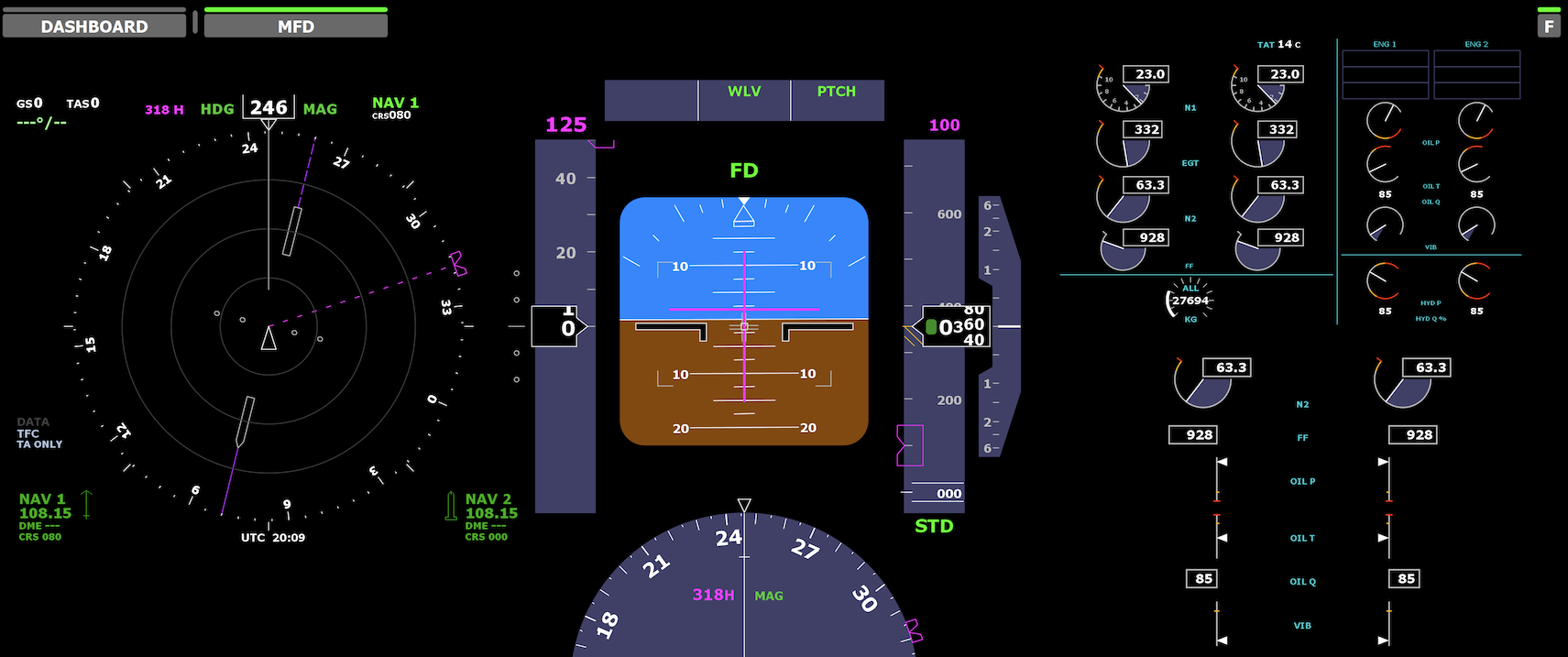
Live Dashboard — Orbital Transfer Calculator
PySide6 HMI zeigt einen Hohmann-Transfer von LEO nach GEO. Eingabefeld links, Physik-Ergebnisse und KI-Surrogatvorhersage rechts nebeneinander, mit eingebettetem Matplotlib-Orbitalplot maßstabsgetreu unten.
Physics Engine
Hohmann Transfer
Bi-Elliptic Transfer
Phasing Manoeuvres
Tsiolkovsky Rocket Eq.
Bi-Elliptic Transfer
Phasing Manoeuvres
Tsiolkovsky Rocket Eq.
AI Surrogate
R² = 0.9993
MAE = 16.47 m/s
MAPE = 2.88 %
40,000 test scenarios
MAE = 16.47 m/s
MAPE = 2.88 %
40,000 test scenarios
generate_data.py — 200.000 Missionsszenarien
Terminal-Ausgabe der synthetischen Datenpipeline: Orbitradien, Raumfahrzeugmasse, Isp und Manövertyp werden zufällig gesampelt; die Physik-Engine berechnet den exakten Delta-v- und Treibstoffmassen-Grundwahrheitswert für jedes Szenario. Das Ergebnis wird als orbital_data.csv gespeichert.
Training Coverage
Earth · Moon · Mars
LEO → Trans-Lunar
v_c: 261 – 7,784 m/s
No body flags needed
LEO → Trans-Lunar
v_c: 261 – 7,784 m/s
No body flags needed
Dataset Split
200,000 total
160,000 train (80 %)
40,000 test (20 %)
Clean, zero measurement noise
160,000 train (80 %)
40,000 test (20 %)
Clean, zero measurement noise
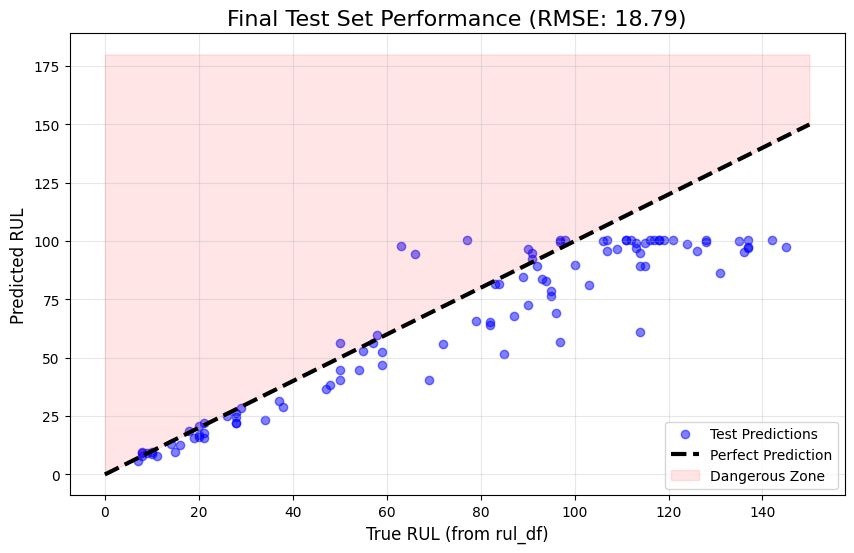
train_model.py — 5-stufige MLP-Trainings-Pipeline
Das Terminal protokolliert alle fünf Stufen: Datensatz laden → StandardScaler-Vorverarbeitung → 80/20-Aufteilung → MLPRegressor-Training → Auswertung auf 40.000 zurückgehaltenen Stichproben. Endergebnis: R² = 0,9993, MAE = 16,47 m/s, RMSE = 30,56 m/s, MAPE = 2,88 %. Modell und Scaler mit Joblib serialisiert.
Model Metrics
MAE = 16.47 m/s
RMSE = 30.56 m/s
MAPE = 2.88 %
R² = 0.9993
RMSE = 30.56 m/s
MAPE = 2.88 %
R² = 0.9993
Stack
scikit-learn MLPRegressor
StandardScaler
Pandas · NumPy
Joblib serialisation
StandardScaler
Pandas · NumPy
Joblib serialisation