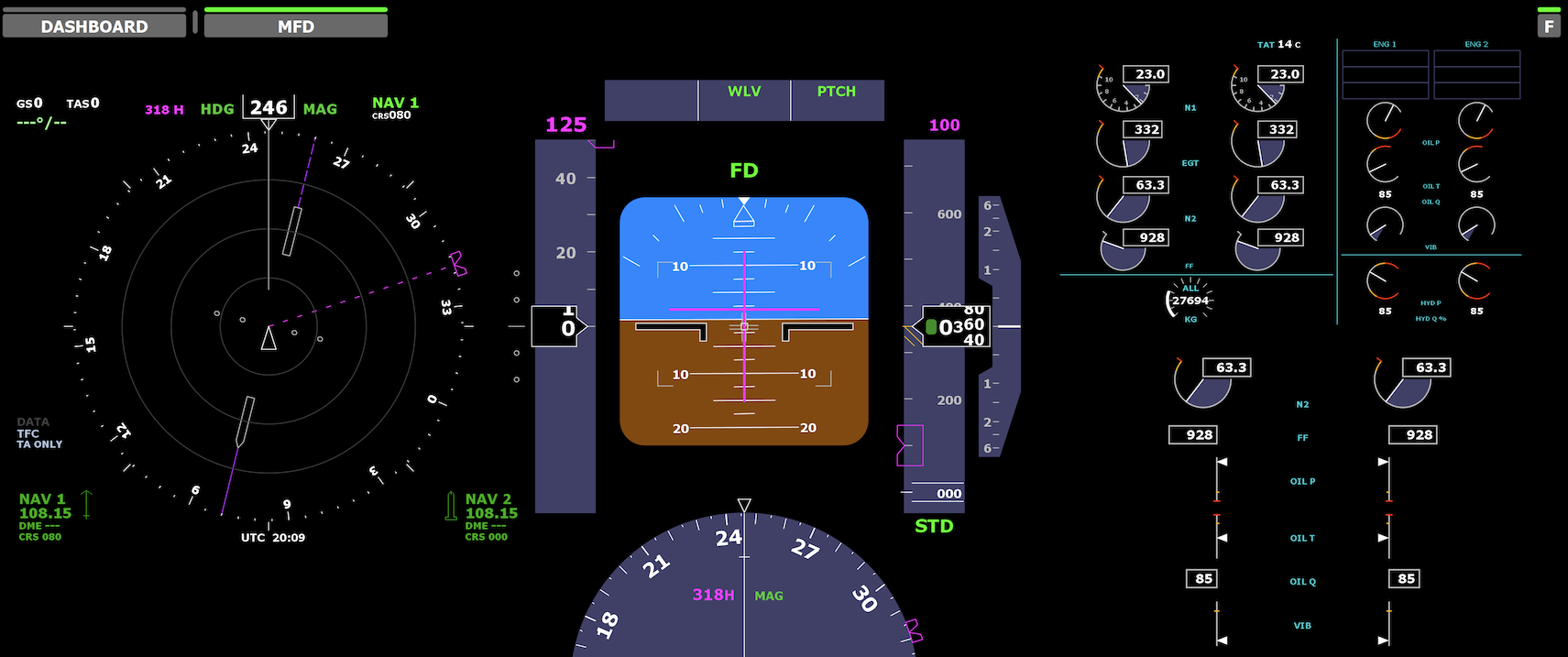
Live Dashboard — Orbital Transfer Calculator
PySide6 HMI showing a Hohmann transfer from LEO to GEO. Input panel on the left, physics results and AI surrogate prediction side-by-side on the right, with an embedded Matplotlib orbit plot drawn to scale at the bottom.
Physics Engine
Hohmann Transfer
Bi-Elliptic Transfer
Phasing Manoeuvres
Tsiolkovsky Rocket Eq.
Bi-Elliptic Transfer
Phasing Manoeuvres
Tsiolkovsky Rocket Eq.
AI Surrogate
R² = 0.9993
MAE = 16.47 m/s
MAPE = 2.88 %
40,000 test scenarios
MAE = 16.47 m/s
MAPE = 2.88 %
40,000 test scenarios
generate_data.py — 200,000 Mission Scenarios
Terminal output of the synthetic data pipeline: orbit radii, spacecraft mass, Isp, and manoeuvre type are randomly sampled; the physics engine computes the exact delta-v and propellant mass ground truth for each scenario. The result is saved as orbital_data.csv.
Training Coverage
Earth · Moon · Mars
LEO → Trans-Lunar
v_c: 261 – 7,784 m/s
No body flags needed
LEO → Trans-Lunar
v_c: 261 – 7,784 m/s
No body flags needed
Dataset Split
200,000 total
160,000 train (80 %)
40,000 test (20 %)
Clean, zero measurement noise
160,000 train (80 %)
40,000 test (20 %)
Clean, zero measurement noise
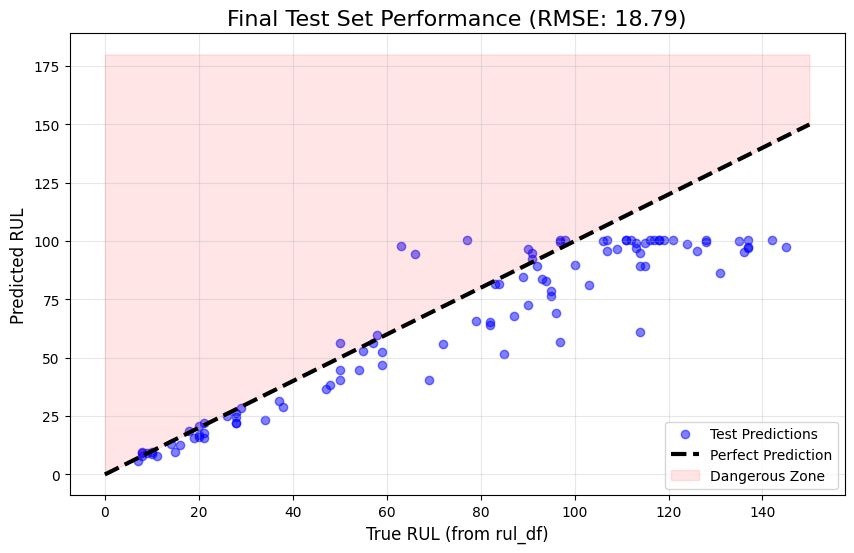
train_model.py — 5-Stage MLP Training Pipeline
The terminal logs all five stages: dataset load → StandardScaler preprocessing → 80/20 split → MLPRegressor training → evaluation on 40,000 held-out samples. Final output: R² = 0.9993, MAE = 16.47 m/s, RMSE = 30.56 m/s, MAPE = 2.88 %. Both model and scaler serialised with Joblib.
Model Metrics
MAE = 16.47 m/s
RMSE = 30.56 m/s
MAPE = 2.88 %
R² = 0.9993
RMSE = 30.56 m/s
MAPE = 2.88 %
R² = 0.9993
Stack
scikit-learn MLPRegressor
StandardScaler
Pandas · NumPy
Joblib serialisation
StandardScaler
Pandas · NumPy
Joblib serialisation